Pinout
Stand 2019-05-07
- Buzzer auf PIN 26
- Servo Pin 33
- Neopixel D25
- Stepper auf pins 5, 16 (RX2), 32, 15
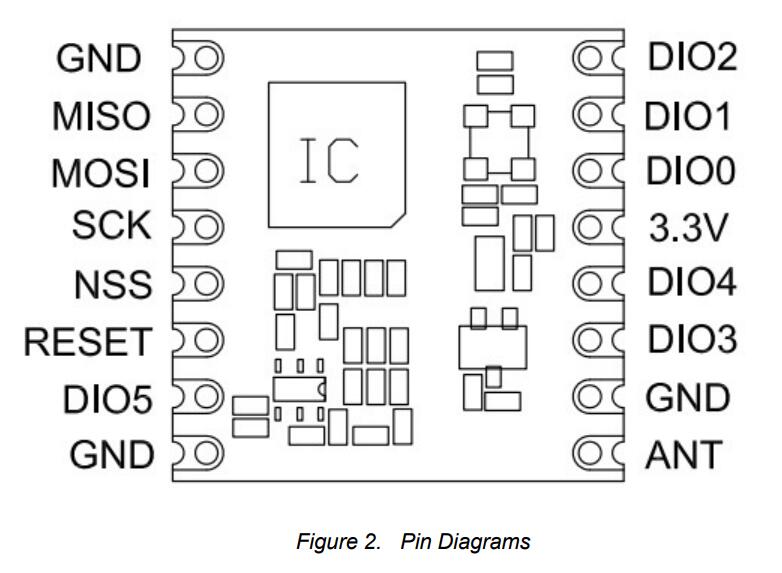
- LoRa: 19 MISO, 23 MOSI, 18 SCK, 4 Reset, DIO1 17 (alias TX2), DIO0 14.
- CO2: 13 RX (connect to TX on Sensor!), 12 TX (connect to RX on Sensor!)
- Limitswitch auf pin 34
Evtl. alte Infos

- LoRa: 19 MISO, 23 MOSI, 18 SCK, 4 Reset, DIO1 17 (alias TX2), DIO0 14. https://www.aliexpress.com/item/free-shipping-10pcslot-RFM95W-20dBm-100mW-868Mhz-915Mhz-DSSS-spread-spectrum-wireless-transceiver-module-SPI-SMD/32833031804.html aufgelötet auf https://www.aliexpress.com/item/10pcs-Serial-Port-WIFI-ESP8266-Module-Adapter-Plate-With-IO-Lead-Out-For-ESP-07-ESP/32881827067.html
- CO2: 13 RX (connect to TX on Sensor!), 12 TX (connect to RX on Sensor!) https://www.aliexpress.com/item/1pcs-MH-Z19-NDIR-CO2-Sensor-Module-infrared-co2-sensor-0-5000ppm/32815796002.html
Freie Pins
- Pins 6 to 11 not recomended for use (connected to flash).
- GPIO 0,2 special function at boot-up.
- Pin 25 (Servo-Pin)
- 5
- 16 (RX2)
- 15
- 34,35 (nur INPUT!)
For reference: https://randomnerdtutorials.com/esp32-pinout-reference-gpios/
28BYJ48 Stepper-Motor
Mit ULN2003 Driver Board. Auf pins 16, 17, 5, 27 und Limit-Switch mit externem Pulldown auf Pin 34.
Erste Tests sind vielversprechend. Das Ding läuft leise und erstaunlich präzise. Hat ein bisschen Spiel, verliert aber keine Schritte und kann den Limit-Switch wieder genau anfahren.

PCB
https://easyeda.com/Xelef2000/co2andtemp
Überarbeitete Version, mit JLCPCB-kompatiblen SMD-Teilen: https://easyeda.com/ivo.bloechliger/v1-9
Prototyp


LoRa - Config
Edit file project_config/lmic_project_config.h in lmic Arduino library
On https://console.thethingsnetwork.org go to Applications → CO2-ksbg → Add device
- Name: tech-lab-co2-sensor-001 etc.
- Activation Method ABP